Intelligent Assembly System
This repository is established for the project in which assembly task uses Staubli TX90 industrial robot. And this repository includes modeling, motion planning, motion control, force control, simulation, test experiment and demos about the whole project for 3C and reducer.
Prototype of Intelligent Assembly System
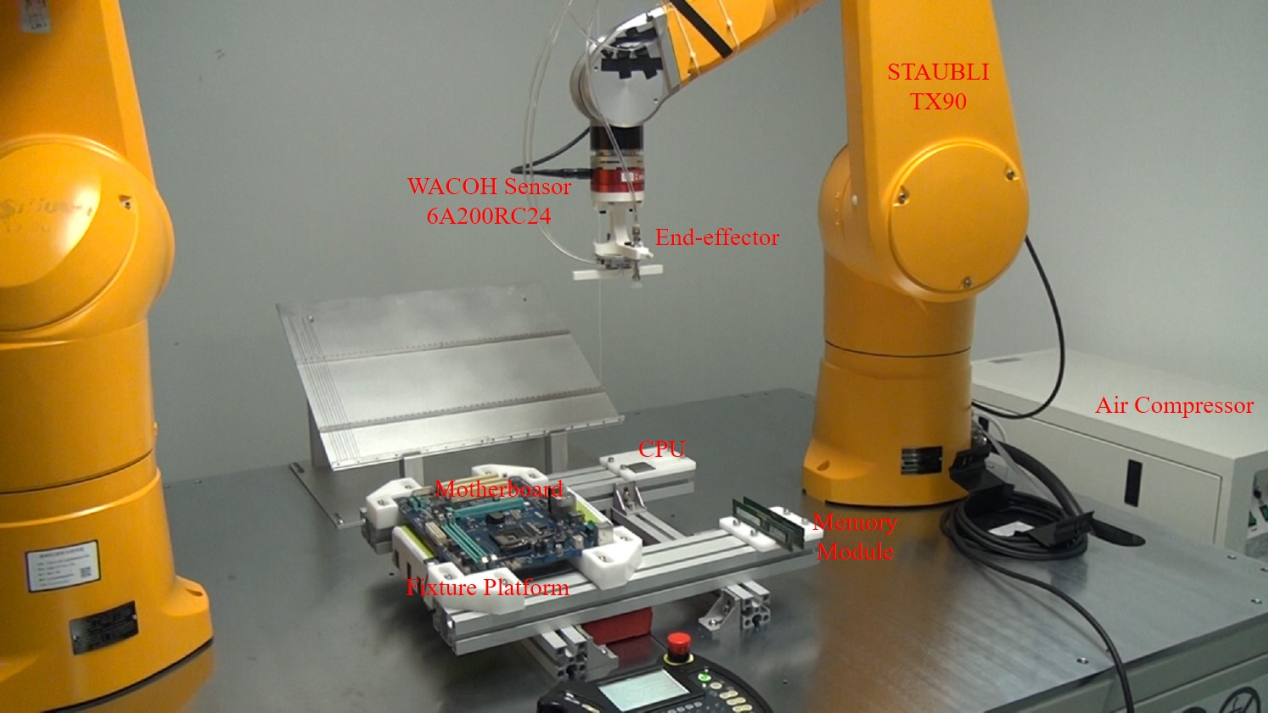 Prototype for 3C Assembly
Prototype for 3C Assembly
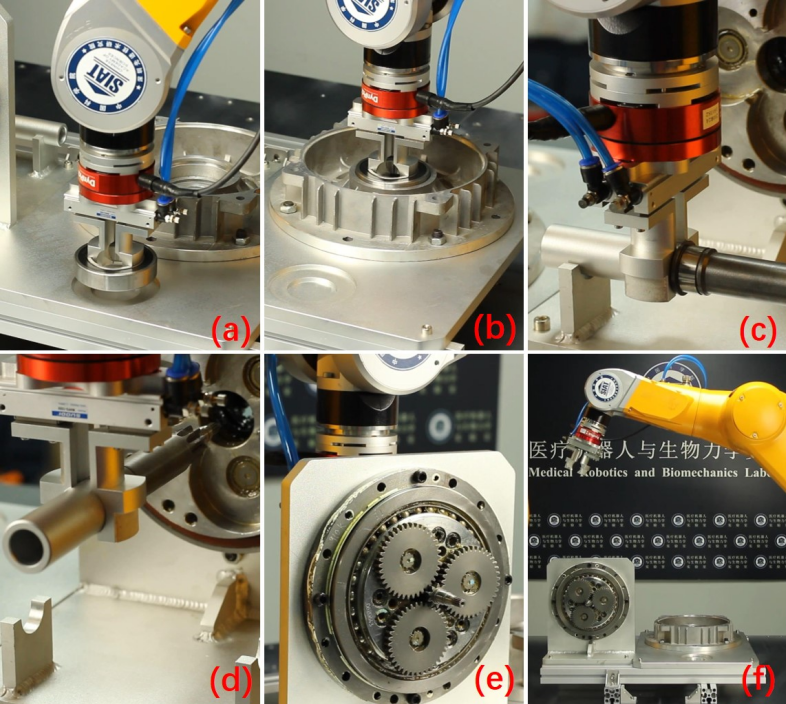
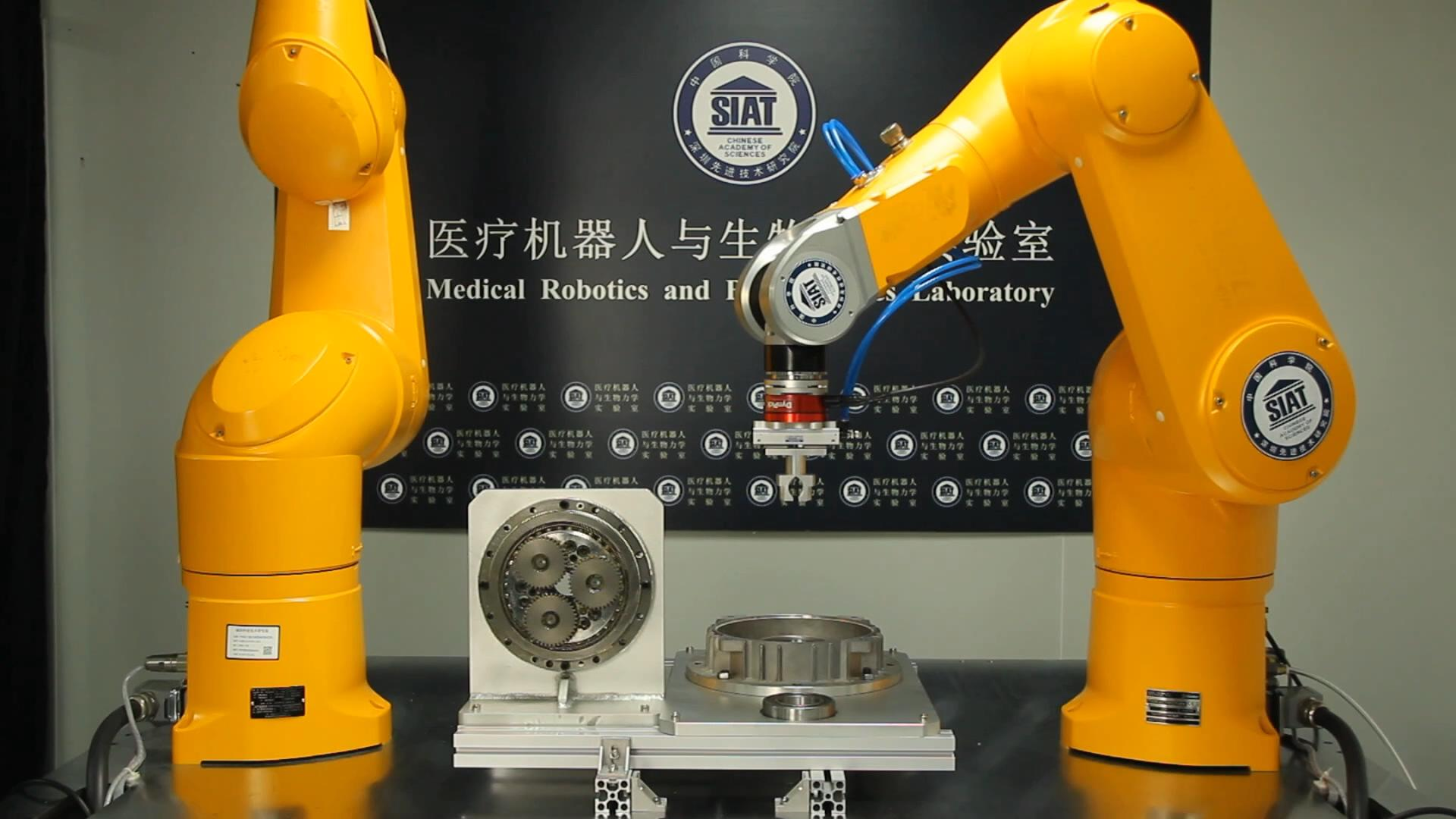 Prototype for Reducer Assembly
Prototype for Reducer Assembly
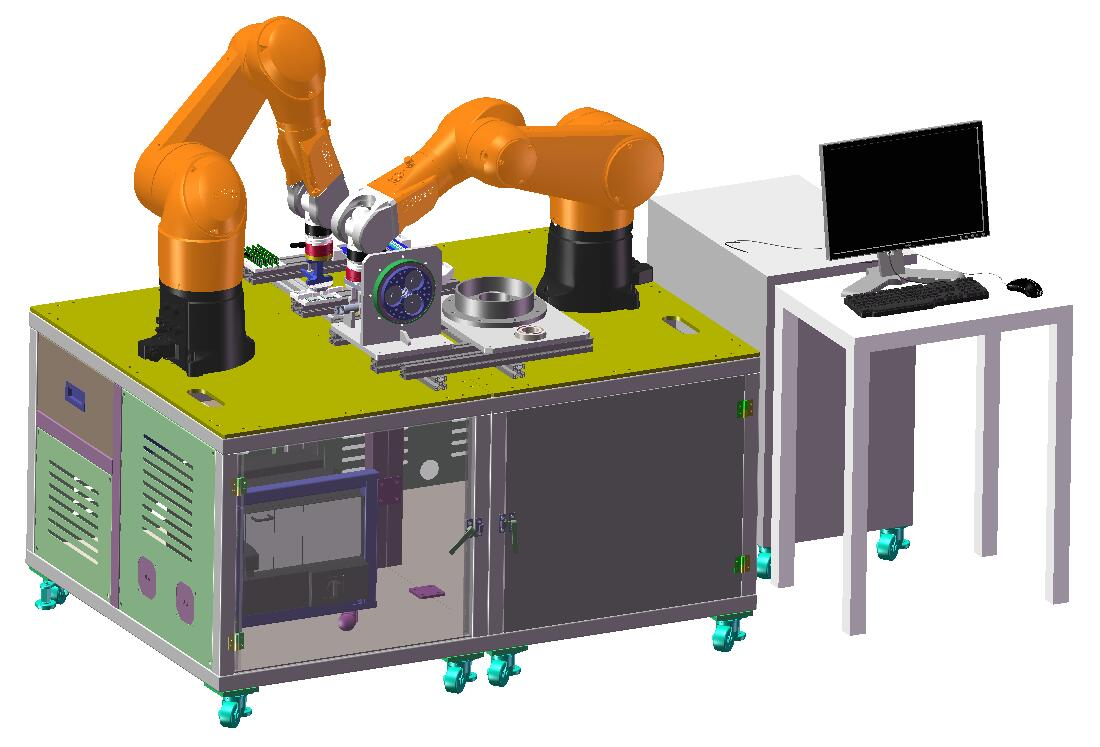
Simulation of Intelligent Assembly System
Simulation for 3C intelligent assembly
Simulation for reducer intelligent assembly
Demo of Intelligent Assembly System
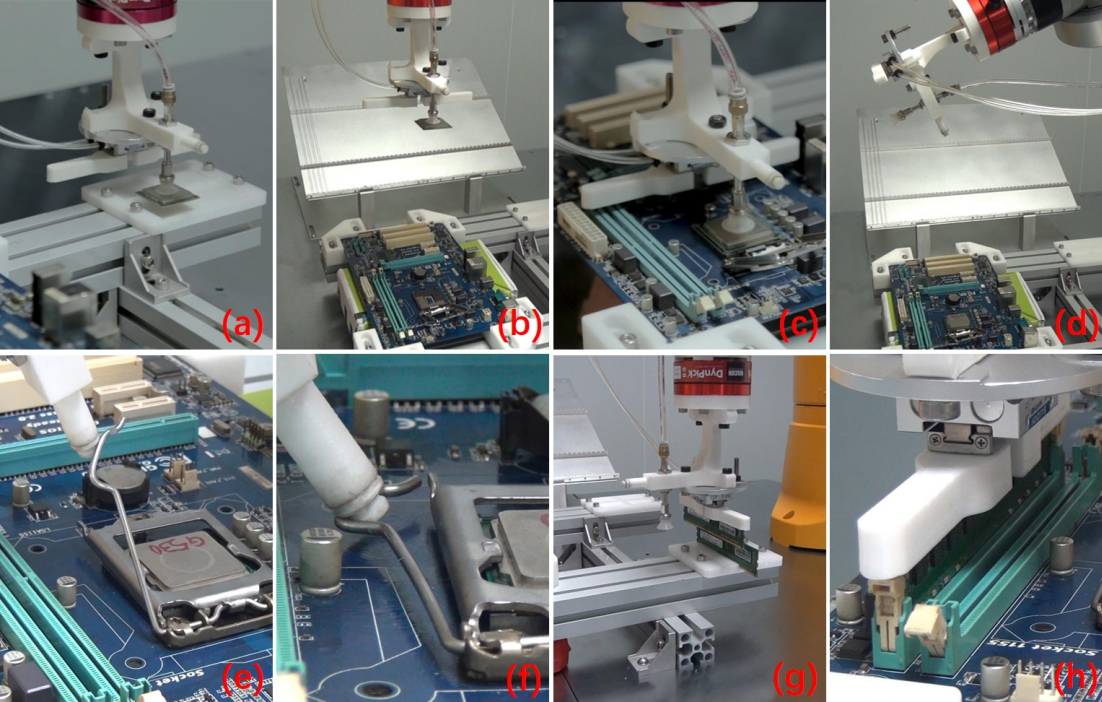 Demo for 3C Assembly
Demo for 3C Assembly
 Demo for Reducer Assembly
Demo for Reducer Assembly